PRONOBIS - Robotically navigated prostate biopsy
SHORT SUMMARY
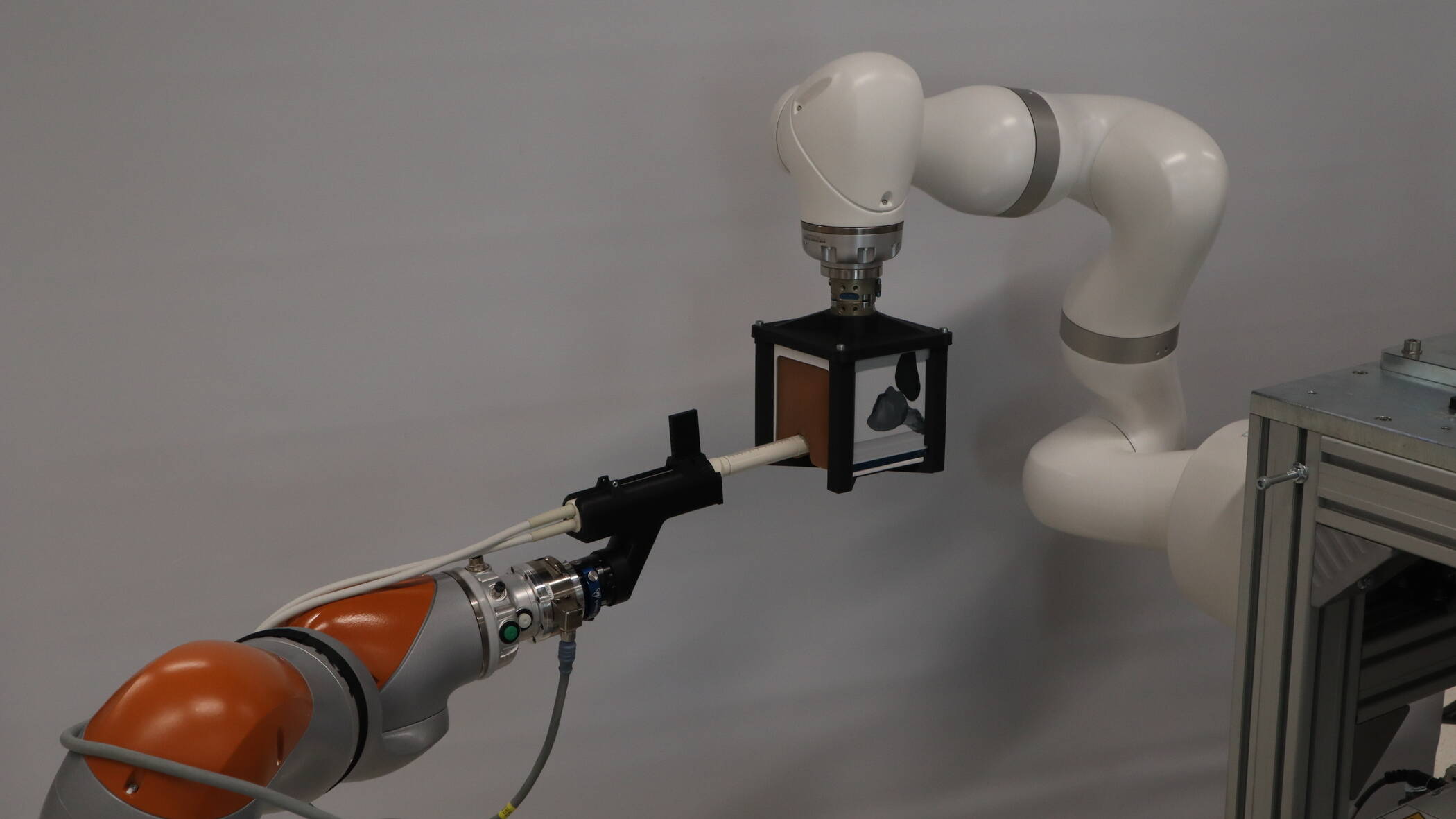
PRONOBIS is an advanced pre-clinical robotic platform designed for the research and development of autonomous image-guided prostate biopsy workflows. The system architecture features a dual-robot cell in which a robotic manipulator performs standardized rotational micro-ultrasound sweeps of the prostate gland within a controlled experimental environment. A force-controlled motion compensation module corrects for involuntary patient displacement during image acquisition, ensuring geometric consistency across sweep frames. Centralized perception and planning are provided through a deep learning-based segmentation pipeline and a clinician-facing graphical interface, creating a realistic clinical environment for testing autonomous biopsy workflows.
The platform serves as a bridge for DeepTech innovations in medical robotics, focusing on AI-driven prostate segmentation, three-dimensional volumetric reconstruction, and image-guided surgical planning. It is an ideal environment for clinical collaborations, talent secondments, and student theses in medical robotics and computer-assisted intervention.
In alignment with human-centric automation principles, PRONOBIS emphasizes supervised autonomy and clinician oversight, enabling structured delegation of well-defined procedural subtasks while preserving full clinical control over critical decisions. The platform operates without pre-procedural multiparametric MRI, enabling a self-contained, image-driven diagnostic workflow suitable for deployment beyond specialized tertiary centers. Within a broader research framework, the testbed offers accessible infrastructure for research organizations, clinical partners, and industry stakeholders to develop and validate intelligent, standardized, and accessible prostate cancer diagnostic solutions.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Zagreb, Faculty of Mechanical Engineering and Naval Architecture |
| Department or Lab | Department of Robotics and Automation of Production Systems |
| Name of Building | Regional Center of Excellence for Robotic Technology, CRTA |
| Physical Address | Ulica Ivana Lučića 5, 10000 Zagreb, Croatia |
| Website Links | https://crta-robotics.com/ |
| Institutional contact name | Marko Švaco |
| Institutional contact email | marko.svaco@fsb.unizg.hr |
APPLICATION CASES
| Application case: | Short description: |
| Autonomous Robotic Prostate Biopsy & Image-Guided Surgical Planning |
Clinicians, engineers, and researchers can develop and validate autonomous robotic biopsy workflows using a dual-robot platform synchronized via real-time ultrasound perception and motion compensation control. The system is focused on standardized probe trajectory execution, active patient motion stabilization, and deep learning-based prostate segmentation from micro-ultrasound images. Three-dimensional prostate reconstruction and a clinician-facing planning interface are used to optimize biopsy target selection and needle trajectory planning for varying patient anatomies.
This case has been developed in close collaboration with experienced urologists from the University of Zagreb School of Medicine, with the prototype validated on anatomically realistic medical phantoms achieving sub-millimetric reconstruction variability. The platform supports both engineering research and clinical workflow studies, with ongoing development targeting future in vivo validation. |
| Clinical Workflow Integration & Biopsy Planning | Researchers and clinicians use the robotic platform together with micro-ultrasound imaging and a custom graphical interface to design, simulate, and validate biopsy procedures before clinical translation. Typical experiments include autonomous sweep repeatability testing, motion perturbation and compensation trials, segmentation accuracy evaluation, and clinician interaction studies for target selection and needle alignment. |
| Ultrasound Dataset Acquisition & AI Model Development | Participants develop and train deep learning segmentation models on an annotated micro-ultrasound dataset acquired under standardized robotic conditions. Experiments include model benchmarking, inter-observer variability analysis, and domain adaptation across imaging devices and patient anatomies. Internally developed Annotation Platform can help with annotating sensitive data. |
| Education, Clinical Training & Research Demonstrators |
Used for MSc and PhD student projects, clinical staff training, and medical robotics research demonstrations. Activities include robotic control fundamentals, ultrasound image interpretation, AI-assisted diagnostic workflows, and rapid prototyping of image-guided intervention concepts for minimally invasive urology.
Used for MSc and PhD student projects, clinical staff training, and medical robotics research demonstrations. Activities include robotic control fundamentals, ultrasound image interpretation, AI-assisted diagnostic workflows, and rapid prototyping of image-guided intervention concepts for minimally invasive urology. Used for MSc and PhD student projects, clinical staff training, and medical robotics research demonstrations. Activities include robotic control fundamentals, ultrasound image interpretation, AI-assisted diagnostic workflows, and rapid prototyping of image-guided intervention concepts for minimally invasive urology. Used for MSc and PhD student projects, clinical staff training, and medical robotics research demonstrations. Activities include robotic control fundamentals, ultrasound image interpretation, AI-assisted diagnostic workflows, and rapid prototyping of image-guided intervention concepts for minimally invasive urology. Used for MSc and PhD student projects, clinical staff training, and medical robotics research demonstrations. Activities include robotic control fundamentals, ultrasound image interpretation, AI-assisted diagnostic workflows, and rapid prototyping of image-guided intervention concepts for minimally invasive urology. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, Other (Hospitals)
Academic stakeholders
PhD students, MSc students, Researchers, Other (Professors)