MobilePlan - Optimization-powered mobile manipulation task planning for agriculture pick-and-carry tasks
SHORT SUMMARY
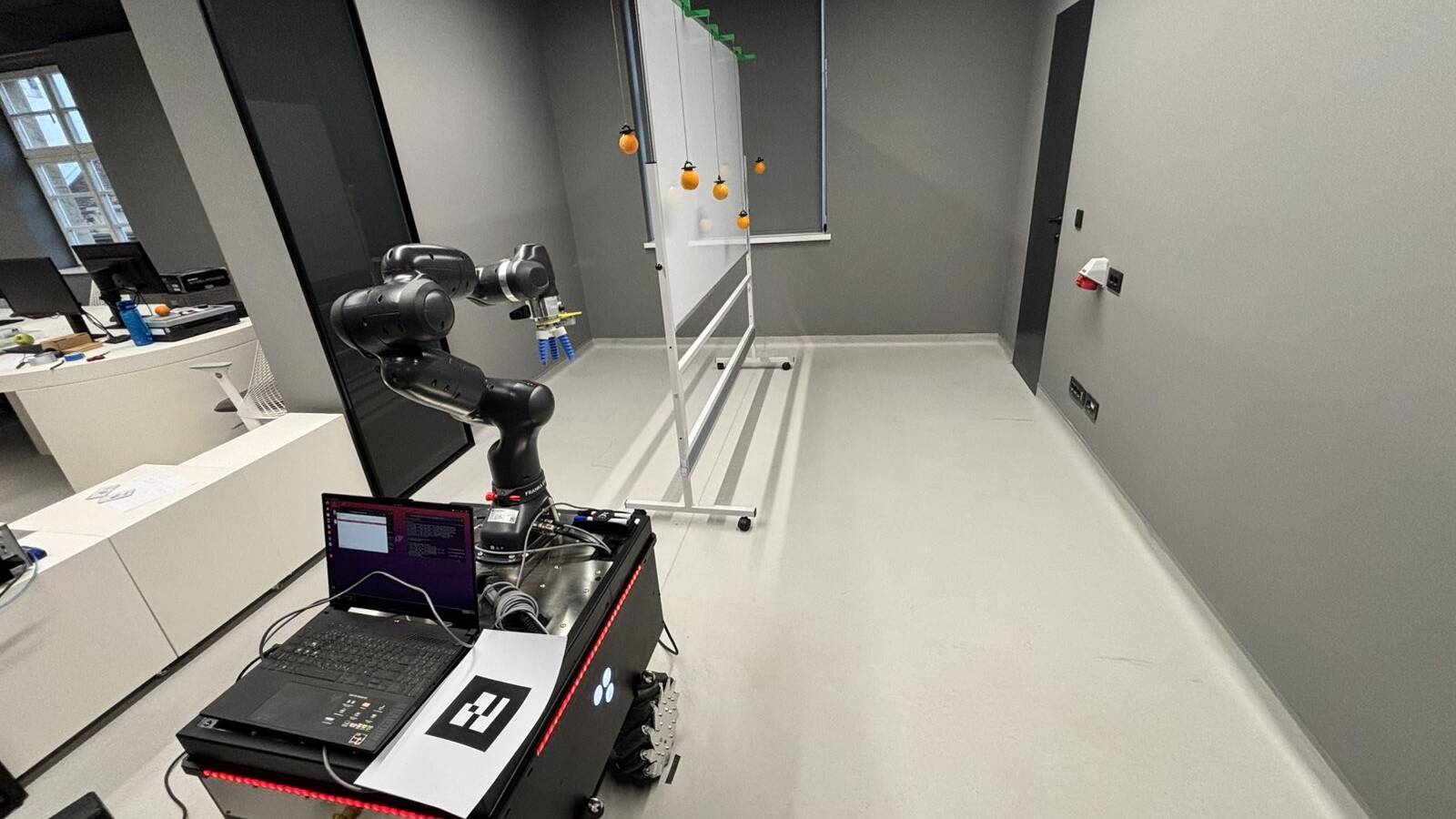
The proposed TestBed offers an integrated platform for validating multi-robot autonomous crop collection in realistic agricultural logistics scenarios. Its core technology focus is the coordination of heterogeneous mobile manipulators through an optimization-based global planner, where the Crop Collection Problem is formulated as a Flexible Multi-Depot Capacitated Vehicle Routing Pickup Problem (FMDCVRP-P). This approach enables robots to dynamically start and end at different depots, reducing unnecessary travel and minimizing overall mission makespan.
The TestBed combines Mixed-Integer Linear Programming (MILP) optimization with a full ROS2–ROS1 simulation and deployment pipeline, including Gazebo-based multi-robot environments, task scheduling, MoveIt-enabled manipulation, and autonomous navigation using AMCL and TEB planners integrated for the RBKAIROS+ Mobile Manipulator.
This TestBed is highly relevant to DeepTech and Industry 5.0, supporting scalable, intelligent, and human-centered automation for next-generation sustainable agriculture and autonomous logistics.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade – School of Electrical Engineering |
| Department or Lab | ETF Robotics Lab |
| Name of Building | Palace of Science |
| Physical Address | Kralja Milana 11, 11000, Belgrade, Serbia |
| Website Links | https://robot.etf.bg.ac.rs |
| Institutional contact name | Prof. Dr. Kosta Jovanovic |
| Institutional contact email | kostaj@etf.rs |
APPLICATION CASES
| Application case: | Short description: |
| Multi-Robot Crop Collection Route Optimization (PoC) | validation of optimization-based task allocation and routing for fleets of mobile manipulators performing post-harvest crop bin pickup and delivery while minimizing makespan and respecting payload and depot constraints |
| Autonomous Navigation and Obstacle Avoidance in Unstructured Environments | testing robust navigation of RB-KAIROS platforms using AMCL and TEB in agricultural or industrial spaces with sparse features and non-uniform obstacles |
| Mobile Manipulation Pick-and-Carry Experiments | integration of manipulation planning with autonomous base positioning to perform crop-bin pickup, transport, and delivery missions in simulation and on the real platform |
| Educational Use in Robotics and Autonomous Systems Courses | supports coursework and student projects in ROS, optimization, mobile manipulation, and Industry 5.0 automation |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, Professional Associations, SMEs, Government Bodies, Community, Other (agri-tech integrators, logistics operators, farm cooperatives)
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers, Other (robotics laboratories, autonomous systems research groups)