Human-Robot Co-manipulation and Handling of Flexible Materials
SHORT SUMMARY
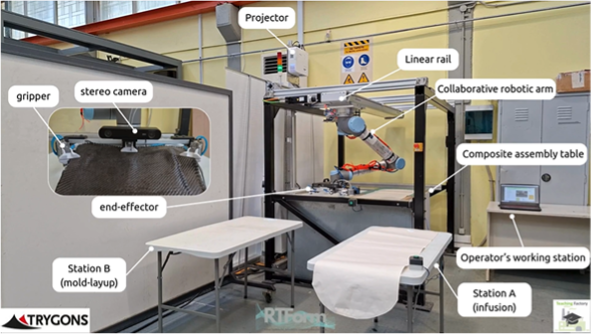
The testbed focuses on the collaborative handling of flexible and semi-flexible materials, including foam-reinforced structures and composite sheets such as fiberglass and carbon fiber. It integrates an industrial collaborative robot (cobot) with low-latency perception systems to synchronize operations with a human operator. This ensures the safe and efficient handling and transfer of materials. Validated use cases include the manufacturing of maritime and automotive composites, applications requiring high-precision placement and delicate handling.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Patras, Greece |
| Department or Lab | Laboratory for Manufacturing Systems & Automation (LMS) – Department of Mechanical Engineering & Aeronautics |
| Name of Building | Main Building of Department of Mechanical Engineering & Aeronautics |
| Physical Address | Campus of University of Patras, Rio, Greece |
| Website Links | https://www.upatras.gr |
| Institutional contact name | N/A |
| Institutional contact email |
APPLICATION CASES
| Application case: | Short description: |
| Human-Robot Co-Manipulation of Composite Sheets | Use of the UR10 cobot, depth camera and linear rail to assist operators in transferring large, non-rigid composite sheets. The system synchronizes robot motion with human intent to reduce ergonomic strain. |
| Intuitive “No-Code” Cell Reprogramming | Utilizing the Unity-based HMI to allow operators to define new grasping points and trajectories for different materials without writing code, facilitating rapid production changes. |
| Vision-Based Safety & Operator Tracking | Using the ZED 2 stereo camera and AI to monitor the operator’s position in real-time, ensuring they remain within safety boundaries and adjusting the robot’s speed/path dynamically. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, SMEs
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers