Ergonomic workstation for collaborative polishing - A Vision-Based Framework for Real-Time Fatigue-Aware Adaptation in Physically Intensive Human-Robot Collaboration
SHORT SUMMARY
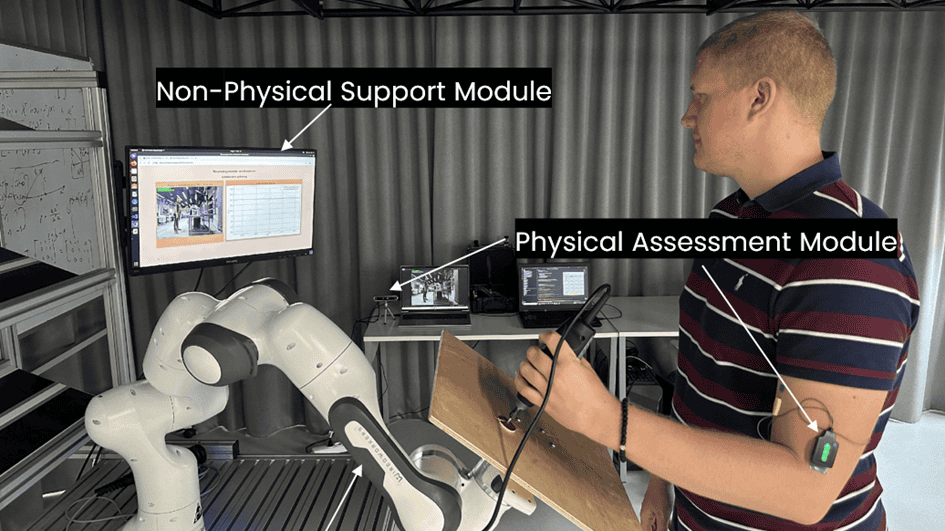
The TestBed offers a real-time, adaptive ergonomic workstation designed for physically demanding human–robot collaborative tasks, with a strong focus on worker safety, well-being, and sustainable performance. It integrates vision-based human pose estimation, EMG-based muscle fatigue monitoring, and standardized ergonomic assessment (RULA) into a closed-loop system that continuously evaluates the operator’s physiological and postural state. Based on this multimodal assessment, a collaborative robot dynamically adapts task configurations to offload fatigued muscle groups and maintain ergonomic working postures.
In parallel, a lightweight visual interface provides real-time feedback on ergonomics, interaction forces, and fatigue-related indicators, supporting operator awareness without increasing cognitive load. The key technology focus lies in AI-driven sensor fusion, real-time decision-making, and adaptive robot control. As a DeepTech platform, the TestBed demonstrates how advanced sensing, machine intelligence, and collaborative robotics can be combined into a scalable, modular solution. It is directly relevant to Industry 5.0, exemplifying human-centric manufacturing where productivity, resilience, and worker health are jointly optimized.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade – School of Electrical Engineering |
| Department or Lab | ETF Robotics Lab |
| Name of Building | Palace of Science |
| Physical Address | Kralja Milana 11, Belgrade, Serbia |
| Website Links | https://www.etf.bg.ac.rs/ |
| Institutional contact name | Kosta Jovanović |
| Institutional contact email | kostaj@etf.rs |
APPLICATION CASES
| Application case: | Short description: |
| Real-Time Ergonomic Human–Robot Collaboration | Deployment of a real-time ergonomic workstation where a collaborative robot adapts task configurations based on continuous assessment of operator posture and muscle fatigue. The TestBed integrates vision-based pose estimation, EMG-based fatigue detection, and RULA scoring to dynamically adjust workpiece positioning and interaction conditions during physically demanding tasks such as polishing or surface finishing. |
| Fatigue-Aware Task Adaptation and Muscle Offloading | Proof-of-concept experiments demonstrating fatigue-aware task adaptation, where the collaborative robot autonomously reconfigures the task to redistribute workload across different muscle groups. Muscle fatigue onset is detected using time-dependent EMG frequency analysis, triggering adaptive robot motion to extend task endurance and reduce musculoskeletal risk. |
| Ergonomic Assessment and Posture Optimization | Evaluation of standardized ergonomic assessment methods (RULA) in dynamic industrial scenarios using real-time, markerless human pose estimation. The TestBed enables experimental comparison of ergonomic versus non-ergonomic task configurations and quantifies their impact on fatigue progression, force sustainability, and task duration. |
| Human-Centered Industry 5.0 Workstation Design | Design and validation of human-centric workstations for Industry 5.0, focusing on safe and intuitive human–robot interaction, adaptive assistance, and reduced physical workload. The TestBed is used to explore shared workspaces, ergonomic workflow design, and proactive safety interventions supported by visual feedback and intelligent decision-making. |
| Education, Research, and Innovation | Use of the TestBed in teaching, MSc and PhD research, and collaborative projects with industrial partners. Students and researchers apply the platform to develop and validate algorithms for pose estimation, EMG signal processing, ergonomic assessment, and adaptive robot control, while SMEs and startups can leverage the TestBed for rapid prototyping and validation of human-centric robotic solutions. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, Professional Associations, SMEs, Government Bodies, Community, Other (Occupational safety agencies, Labor inspectorates, Technology transfer offices)
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers, Other (Visiting researchers, Postdoctoral fellows, Academic collaborators)
Other types of stakeholders
European research partners, Standardization bodies, Funding agencies