ElectroHMI - Testbed for stiffness-aware control of a compliant robot gripper based on electrotactile feedback as a human-machine interface
SHORT SUMMARY
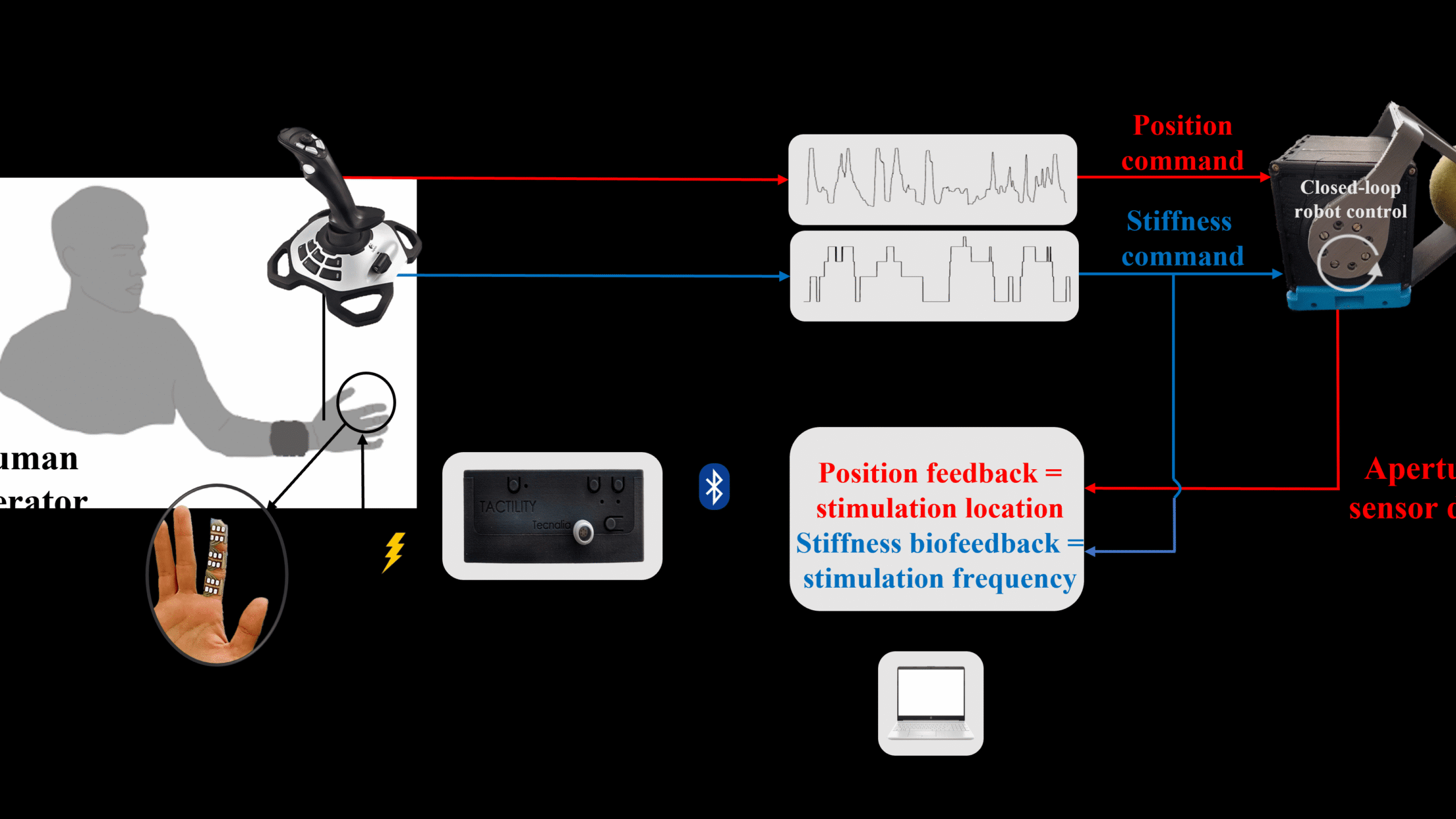
In the TestBed, we designed and developed a high-resolution, compact system delivering electrotactile stimulation to the finger for the closed-loop control of a variable stiffness robot gripper. The feedback conveys information about both gripper aperture and commanded stiffness by modulating the location and frequency of stimulation, respectively. The explicit information about the position and stiffness of a compliant actuator was envisioned to provide better force control without the need to measure and feed back the contact forces between the gripper and the object.
TestBed provides accurate positioning of the gripper without any visual cues. Moreover, stiffness feedback prevents dangerous and harmful grasps, allowing the operator to evaluate the commanded stiffness directly and adjust it proactively. This TestBed underlines stiffness as a primary determinant of safe and effective grasping in robots and demonstrates that even minimal cutaneous feedback can support informed modulation of grasp behavior.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade – School of Electrical Engineering |
| Department or Lab | ETF Robotics Lab |
| Name of Building | Palace of Science |
| Physical Address | Kralja Milana 11, 11000, Belgrade, Serbia |
| Website Links | https://robot.etf.bg.ac.rs |
| Institutional contact name | Prof. Dr. Kosta Jovanovic |
| Institutional contact email | kostaj@etf.rs |
APPLICATION CASES
| Application case: | Short description: |
| Research and educational use for improving feedback clarity and bio-inspired control | supports experiments on grasping objects of different characteristics, improving anticipation of object fragility, reducing slip or damage, and exploring alternative feedback coding strategies and stimulation locations |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, SMEs, Other (robotics integrators, haptics developers, medical-device and rehabilitation technology developers)
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers, Other (HRI labs, haptics labs, control systems researchers)