Automated Robotic Trajectory Generation for Contour-Following Tasks
SHORT SUMMARY
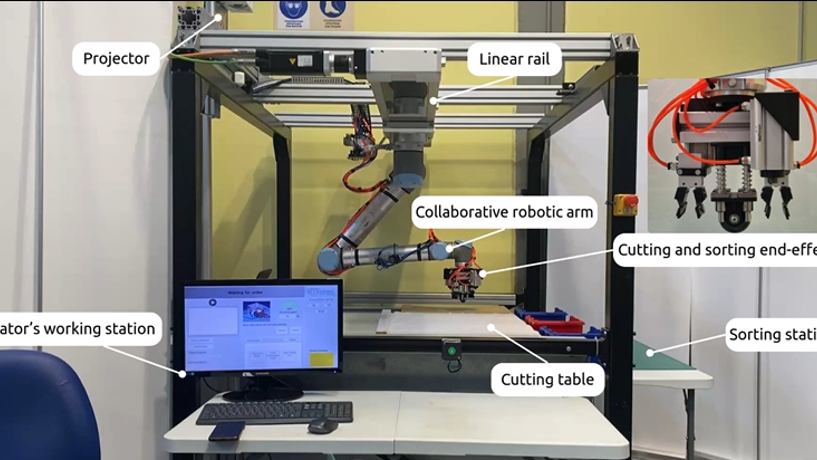
This testbed introduces an automated method for translating DXF data into executable robotic trajectories for large-scale, contour-following tasks. It integrates an overhead UR10 collaborative robot on a linear axis with a custom and easily changeable end-effector to execute planar operations. This allows for rapid, automated transitions between tool operations without encountering kinematic singularities. Validated use cases include automated garment processing in the textiles industry, which demonstrated the system’s ability to reduce ergonomic strain and scale flexible mid-volume production.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Patras, Greece |
| Department or Lab | Laboratory for Manufacturing Systems & Automation (LMS) – Department of Mechanical Engineering & Aeronautics |
| Name of Building | Main Building of Department of Mechanical Engineering & Aeronautics |
| Physical Address | Campus of University of Patras, Rio, Greece |
| Website Links | https://www.upatras.gr |
| Institutional contact name | N/A |
| Institutional contact email |
APPLICATION CASES
| Application case: | Short description: |
| CAD-to-Motion Automated Programming | Utilizing the RTrim toolkit to automate robot motion programming. The system parses .dxf (CAD) files, extracts nested pattern geometries, and automatically generates collision-free trajectories for the UR10 robot to perform precision cutting and picking. |
| Automated Sorting & Order Management | Testing and benchmarking pick-and-place strategies for textile components. The TestBed organizes patterns into batches based on order files, optimizing the robot’s cycle time for sorting different fabric pieces into specific bins as defined in the HMI order management system. |
| Human-Centric Industrial Upskilling | Exploring safe interaction workflows where manual workers transition to supervisors of the robotic cell. The “no-code” interface allows operators to load new design files and manage complex production tasks, facilitating ergonomic improvement and technical skill development. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, SMEs
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers