ASTRO – Autonomous System for Teaching Robotics as part of autonomous racing
SHORT SUMMARY
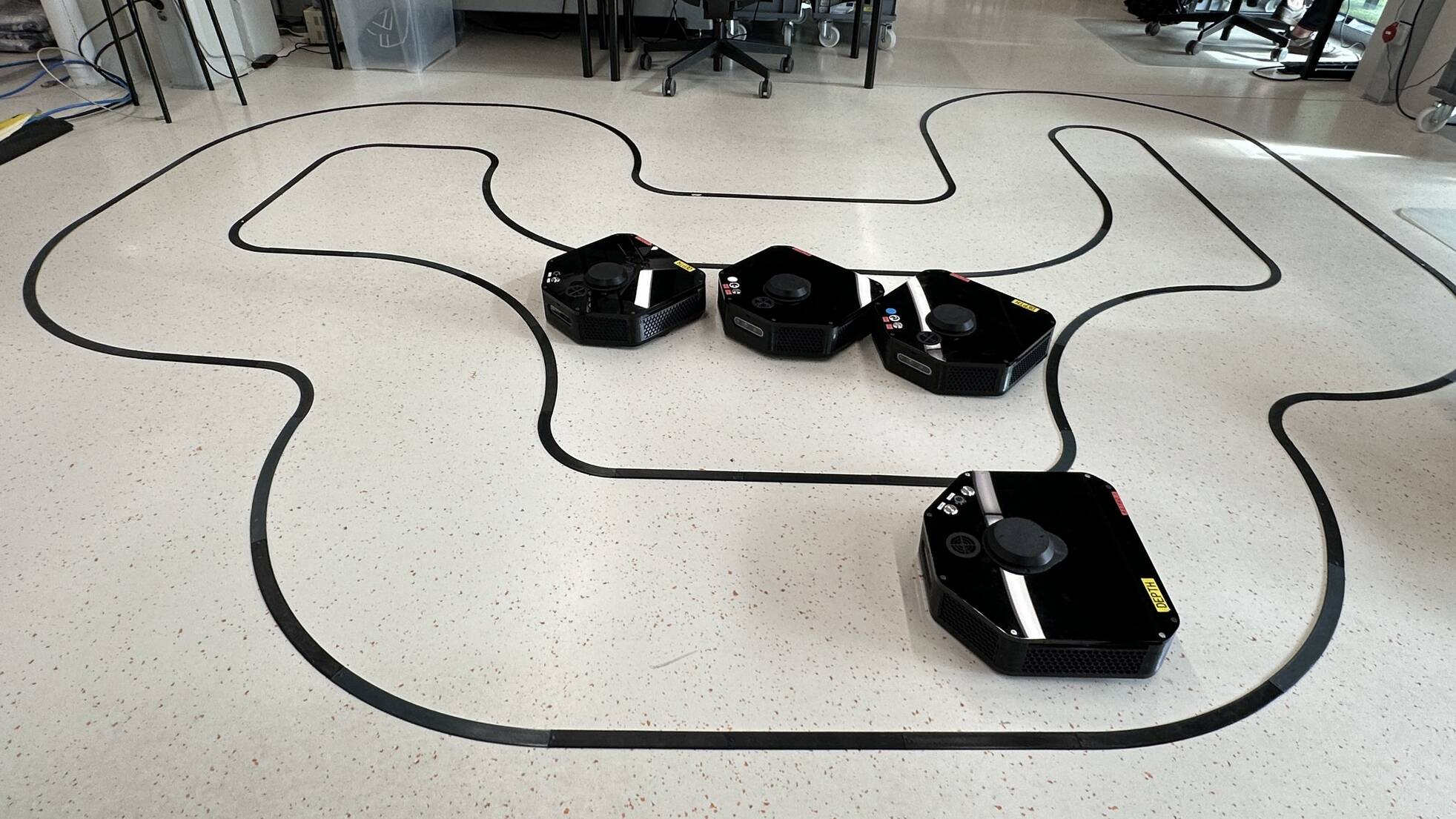
ASTRO (Autonomous System for Teaching Robotics) is a compact differential-drive mobile robot developed at CRTA (Regional Centre of Excellence for Robotic Technologies) at the Faculty of Mechanical Engineering and Naval Architecture (FSB), University of Zagreb. It was purpose-built as an educational and research platform that bridges theoretical knowledge in robotics and control engineering with hands-on practical experience.
The platform serves as a testbed for students and researchers working on motion control algorithms, suspension systems, and autonomous navigation. Its approachable form factor makes it equally suited for outreach activities aimed at inspiring interest in STEM fields, while its open architecture supports advanced research into topics such as Model Predictive Control (MPC), indoor localization, and data-driven autonomy.
ASTRO is currently being used for a dedicated autonomous driving curriculum powered by visual data from an Intel RealSense depth camera. Students drive the robot around a physical track, collect image datasets, train neural network classification models, and then deploy the trained models back onto real hardware — completing a end-to-end machine learning pipeline from data acquisition to real-world inference. This end-to-end workflow teaches practical skills in dataset collection, neural network training, and embedded model deployment.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Zagreb, Faculty of Mechanical Engineering and Naval Architecture |
| Department or Lab | Department of Robotics and Automation of Production Systems |
| Name of Building | Regional Center of Excellence for Robotic Technology, CRTA |
| Physical Address | Ulica Ivana Lučića 5, 10000 Zagreb, Croatia |
| Website Links | https://crta-robotics.com/ |
| Institutional contact name | Marko Švaco |
| Institutional contact email | marko.svaco@fsb.unizg.hr |
APPLICATION CASES
| Application case: | Short description: |
| Model Predictive Control (MPC) | The TestBed supports the development and validation of Model Predictive Control (MPC) algorithms for autonomous and robotic systems operating in dynamic and uncertain environments. Typical application scenarios include trajectory planning, obstacle avoidance, robot motion optimization, and real-time control of multi-DOF robotic platforms. |
| Indoor localization | The TestBed supports the development and evaluation of indoor localization methods for autonomous robotic systems operating in complex indoor environments where GNSS signals are unavailable or unreliable. The infrastructure enables experimentation with sensor fusion approaches combining RGB-D cameras, LiDAR, IMU sensors, fiducial markers, and AI-based perception algorithms for robust real-time localization and mapping. |
| Data-driven autonomy | Typical use cases include autonomous decision-making, adaptive robot behaviour, AI-assisted motion planning, predictive maintenance, perception-driven navigation, and human-aware robotic interaction. The infrastructure enables integration of machine learning, computer vision, sensor fusion, and real-time robotic control frameworks to support autonomous operation in dynamic and uncertain environments. |
| Autonomous driving | The TestBed supports the development, integration, and validation of autonomous driving technologies and intelligent vehicle systems for operation in structured and semi-structured environments. Typical application scenarios include autonomous navigation, perception-based vehicle control, obstacle detection and avoidance, path planning, sensor fusion, and real-time decision-making. The infrastructure enables experimentation with AI-based perception algorithms, cameras, LiDAR, IMU systems, GNSS-denied localization methods, and vehicle control frameworks integrated with robotic and autonomous platforms. |
| N/A | N/A |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, Community
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers