ANDROMEDA - Autonomous drilling for robotic medical applications
SHORT SUMMARY
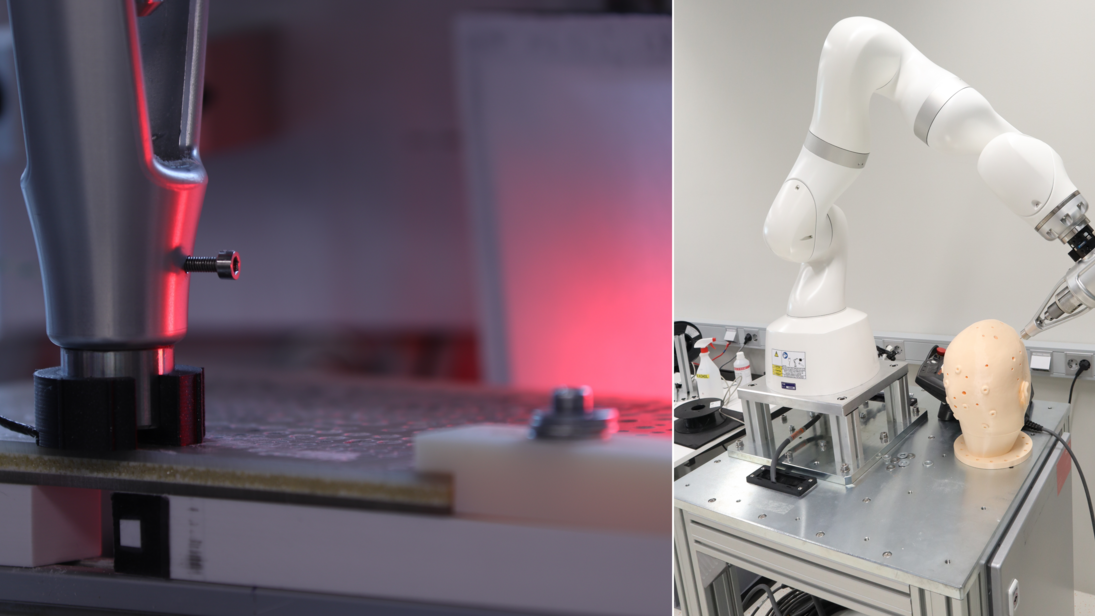
ANDROMEDA is an advanced medical robotics research platform focused on the development of autonomous robotic drilling technologies for neurosurgical applications, with particular emphasis on cranial bone drilling and craniotomy procedures. The project addresses key challenges associated with manual bone drilling, including limited precision, surgeon fatigue, variability in procedural execution, thermal damage, excessive mechanical loading, and uncontrolled drill breakthrough near sensitive intracranial structures.
The platform combines robotic manipulation, real-time sensing, force-controlled drilling, and intelligent safety mechanisms within a unified experimental framework for the development and validation of autonomous surgical workflows. The system integrates multi-modal sensing, including force, torque, temperature, and vision-based monitoring, together with closed-loop control algorithms and breakthrough detection strategies designed to improve surgical precision, repeatability, and procedural safety.
A major focus of the project is the development of intelligent drilling control methods using force regulation, predictive feedforward control based on preoperative imaging data, and real-time signal analysis. The platform supports research in autonomous surgical execution, sensor fusion, machine learning, surgical safety systems, and collaborative robotic assistance for medical procedures.
The project spans research activities from fundamental concept development (TRL1) to engineering design, prototype implementation, and laboratory validation in simulated surgical environments (TRL4). Experimental validation is performed using synthetic cranial bone models and sensorized drilling devices capable of capturing high-frequency process data during drilling operations.
In alignment with human-centric automation principles, ANDROMEDA emphasizes supervised autonomy and clinician oversight. The system is designed to autonomously execute well-defined procedural subtasks while maintaining full surgeon control over critical clinical decisions. The platform serves as an interdisciplinary environment for collaboration between robotics researchers, engineers, neurosurgeons, and industrial partners in the field of medical robotics and computer-assisted surgery.
The infrastructure supports scientific research, technology transfer, student theses, and development of future autonomous robotic systems for minimally invasive and image-guided surgical applications.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Zagreb, Faculty of Mechanical Engineering and Naval Architecture |
| Department or Lab | Department of Robotics and Automation of Production Systems |
| Name of Building | Regional Center of Excellence for Robotic Technology, CRTA |
| Physical Address | Ulica Ivana Lučića 5, 10000 Zagreb, Croatia |
| Website Links | https://crta-robotics.com/ |
| Institutional contact name | Bojan Šekoranja |
| Institutional contact email | bojan-sekoranja@fsb.unizg.hr |
APPLICATION CASES
| Application case: | Short description: |
| Autonomous Cranial Bone Drilling & Robotic Neurosurgical Assistance |
Researchers, clinicians, and engineers can develop and validate autonomous robotic drilling workflows for neurosurgical procedures using a sensorized robotic drilling platform with integrated force control and real-time safety monitoring. The system focuses on precise control of drilling force, adaptive feed-rate regulation, breakthrough detection, and thermal monitoring during cranial bone drilling procedures. The platform integrates closed-loop force control, CT-informed feedforward prediction, and multi-layer safety constraints to improve drilling consistency and reduce the risk of uncontrolled penetration near sensitive intracranial structures. Experimental validation includes drilling trials on synthetic cranial bone specimens under controlled laboratory conditions. This application is being developed in collaboration with neurosurgical experts and industrial partners specializing in robotic surgery and neuronavigation systems. The platform supports both engineering research and future translation toward robotic-assisted neurosurgical workflows. |
| Sensor Fusion, Safety Systems & Surgical Process Monitoring | The system enables research on multimodal sensing and intelligent safety mechanisms for robotic surgery. Integrated force, torque, temperature, and vision sensors provide synchronized real-time measurements of the drilling process, allowing investigation of drilling phases, material transitions, and breakthrough behavior. Researchers can evaluate force-based breakthrough detection algorithms, predictive control methods, and redundant safety architectures designed to improve reliability and robustness during autonomous surgical execution. |
| Robotic Control, AI & Surgical Automation Research | The platform serves as a testbed for advanced robotic control strategies, machine learning models, and AI-assisted surgical automation. Typical research activities include force-control optimization, adaptive drilling strategies, signal-based event detection, sensor fusion, and predictive modeling of drilling behavior based on preoperative imaging and real-time measurements. The system also supports integration with robotic manipulators and neuronavigation platforms for future development of fully autonomous image-guided surgical workflows. |
| Education, Research Demonstrators & Clinical Collaboration | ANDROMEDA is used for MSc and PhD student projects, robotics education, and interdisciplinary collaboration between engineering and medical researchers. Activities include robotic control development, medical sensing integration, surgical robotics demonstrations, and rapid prototyping of autonomous medical systems. The platform provides infrastructure for experimental validation, scientific publications, and collaboration between academia, clinical institutions, and industrial partners in the field of medical robotics. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Other (Hospitals)
Academic stakeholders
PhD students, MSc students, Researchers, Other (Professors)