CircuBot – AI-Powered Modular Collaborative Robotic System for Object Sorting
SHORT SUMMARY
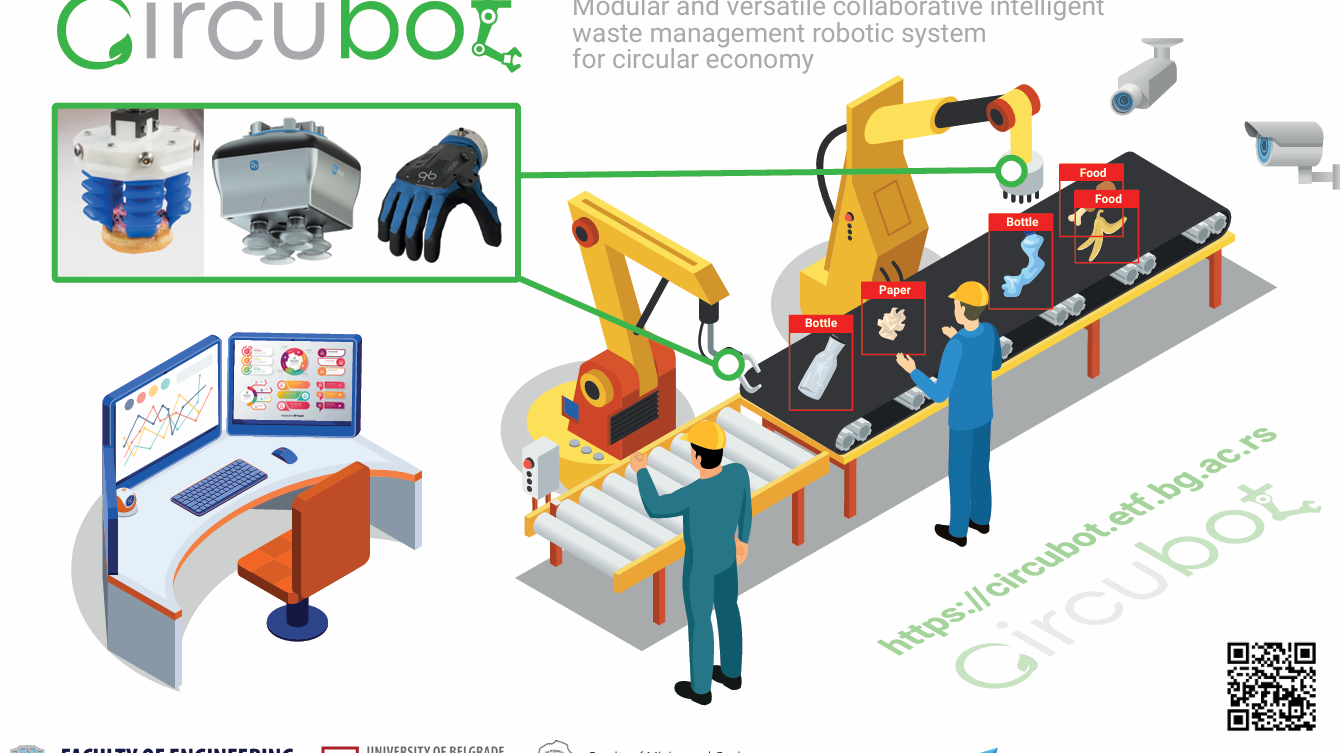
CircuBot is a modular collaborative robotics TestBed designed to support experimentation, validation, and deployment of advanced waste-sorting technologies. It integrates collaborative robots, AI-driven computer vision, soft adaptive gripping, and cloud-based data analytics to enable safe, flexible, and efficient separation of recyclable materials such as PET bottles, metal cans, and small electronic components.
The TestBed provides a controlled yet realistic industrial environment for testing circular economy solutions under real-world conditions, supporting Technology Readiness Levels (TRL) 3–8. CircuBot enables rapid Proof-of-Concept validation and performance assessment for DeepTech innovations in robotics and artificial intelligence.
Aligned with Industry 5.0 principles, CircuBot emphasizes human-centric automation, environmental sustainability, and resilient manufacturing by improving worker safety, enhancing material recovery, and enabling data-driven process optimization. Within the CITADELS framework, the TestBed offers accessible infrastructure for research organizations, SMEs, and industry stakeholders to develop and validate intelligent, sustainable automation solutions.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade – School of Electrical Engineering (ETF) |
| Department or Lab | Department of Signals and Systems, ETF Robotics lab |
| Name of Building | Palace of Science |
| Physical Address | Kralja Milana 11, 11000 Beograd, Serbia |
| Website Links | https://circubot.etf.rs |
| Institutional contact name | Prof. dr Kosta Jovanović |
| Institutional contact email | kostaj@etf.rs |
APPLICATION CASES
| Application case: | Short description: |
| Automated industrial sorting (robot control & manipulation) | Fully autonomous robotic sorting of waste on a conveyor belt. AI-based vision performs real-time object detection and classification, while motion planning generates efficient pick-and-place or pick-and-toss actions using a soft robotic gripper adaptable to irregular shapes. |
| Collaborative human–robot sorting (real-time object detection & task allocation) | Shared human–robot workspace enabling safe collaboration during sorting tasks. Real-time perception and safety monitoring support dynamic task allocation, with robots handling repetitive items and humans managing complex or uncertain objects. |
| Sorting strategy design and optimization | Experimental evaluation and optimization of sorting strategies, including conveyor speed, grasping methods, and robotic cell layouts, using performance metrics such as throughput, accuracy, purity rate, and cycle time. |
| AI model training, validation, and benchmarking | Training and benchmarking of machine-learning models for waste classification under realistic conditions, including variable lighting, occlusions, cluttered scenes, and mixed-material streams. |
| Education, research, and innovation support | Use of the CircuBot testbed for student projects, academic research, professional training, and proof-of-concept demonstrations for SMEs and startups, supporting technology transfer and skill development. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, Professional Associations, SMEs, Government Bodies, Community, Other (environmental NGOs, waste-management authorities, recycling operators, technology transfer offices)
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers