IsaacSim-Nav: High-Fidelity Digital Twin Platform for Autonomous Navigation
SHORT SUMMARY
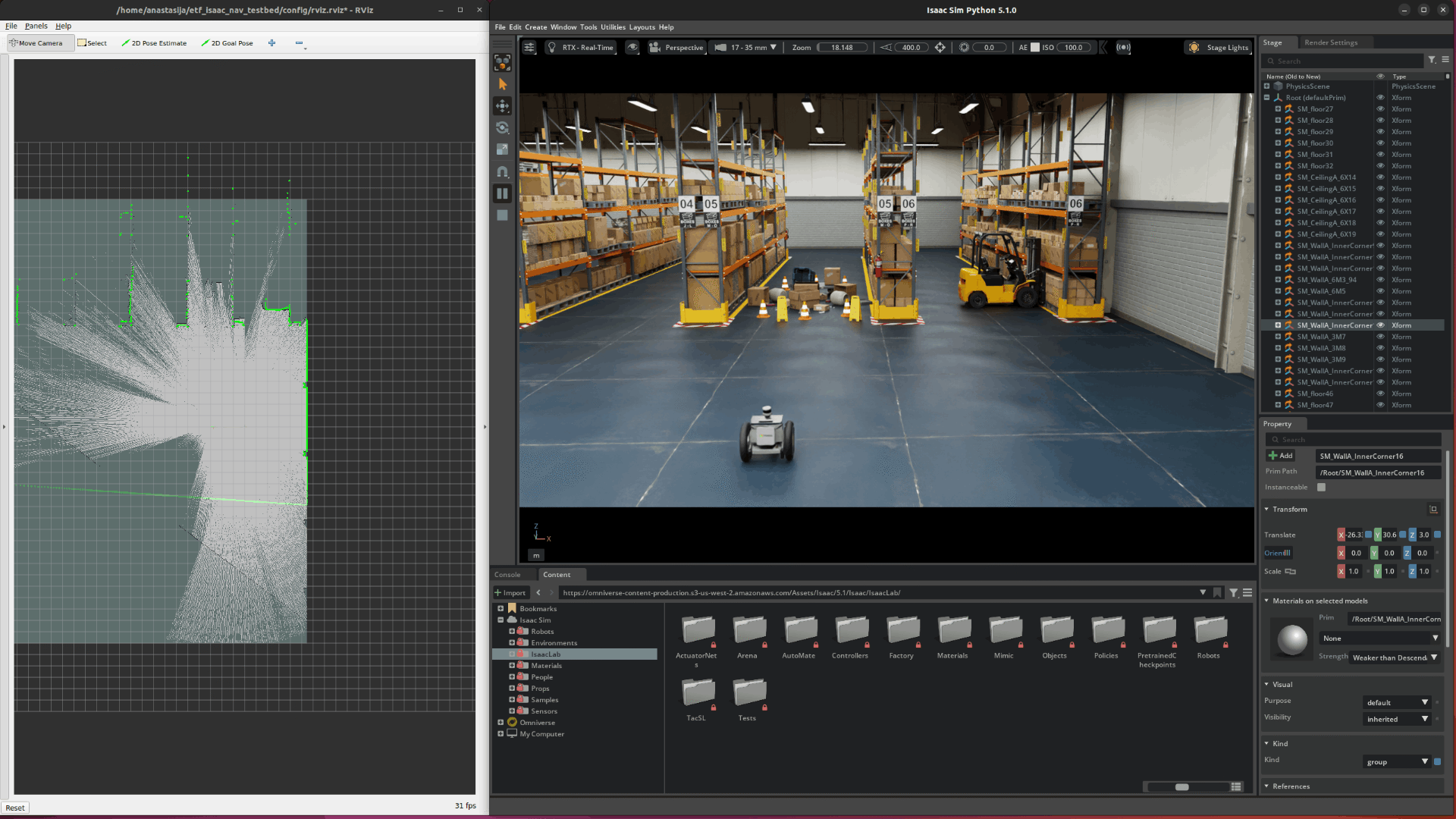
This digital TestBed is an advanced simulation environment built on NVIDIA Isaac Sim (Omniverse), specifically tailored for the development and benchmarking of autonomous mobile robots (AMRs). It provides a high-fidelity “Digital Twin” infrastructure where users can test navigation stacks (such as ROS 2 Nav2) in photorealistic environments with accurate physics. The platform enables complex scenario testing, including multi-robot simulation infrastructure for coordination research, dynamic obstacle avoidance, and sensor fusion (LiDAR, Depth Cameras, IMU) without the risk of hardware damage. Its key differentiator is the high-fidelity sensor simulation and the ability to easily bridge the “Sim-to-Real” gap. It serves as a primary tool for researchers and students to validate algorithms in varied industrial and office-like 3D scenes before physical deployment.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade, School of Electrical Engineering |
| Department or Lab | ETF Robotics |
| Name of Building | Main building ETF |
| Physical Address | Bulevar kralja Aleksandra 73, Belgrade, Serbia |
| Website Links | https://www.etf.bg.ac.rs/en |
| Institutional contact name | dr Kosta Jovanović |
| Institutional contact email | kostaj@etf.bg.ac.rs |
APPLICATION CASES
| Application case: | Short description: |
| Warehouse AMR Navigation | Testing an Autonomous Mobile Robot (AMR) in a cluttered warehouse scene to evaluate path planning robustness. |
| Sim-to-Real Validation | Comparing the behavior of a digital twin (e.g., TurtleBot or Nova Carter) against its physical counterpart at ETF Lab. |
| Socially-Aware Navigation | Simulating robot movement in corridors with dynamic human-like characters (NPCs) to test avoidance logic. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Startups, SMEs
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers