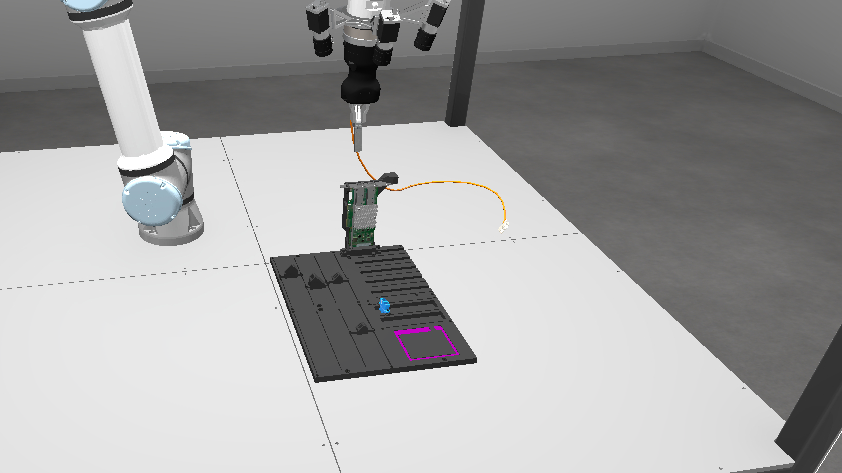
Simulation of flexible cable insertion
SHORT SUMMARY
This TestBed address one of the most stubborn unsolved bottlenecks in electronics manufacturing: dexterous handling and insertion of flexible cables and connectors during server-tray assembly. TestBed enables training of AI policies in simulation — with an open-source simulator as the official evaluation environment and alternative simulators permitted for training. The reference hardware stack comprises a 6-DoF collaborative robot arm, a parallel-jaw gripper, a wrist force-torque sensor, and three wrist-mounted RGB cameras streaming at 20 fps, all interfaced through standard ROS 2 (Kilted Kaiju) topics, services and actions. The TestBed provides high-fidelity SDFormat scene descriptions, URDF/SDF robot models, a baseline controller and hardware abstraction layer, a ROS 2 lifecycle node template that dynamically loads Python policies, an automated scoring engine, example policies, container images, and a reproducible development environment, supporting Industry 5.0 research on sim-to-real, human-centric dexterous robotic manipulation.
HOSTING INSTITUTION AND PI INFO
| Name of Host Organization | University of Belgrade – School of Electrical Engineering |
| Department or Lab | ETF Robotics |
| Name of Building | Palata Nauke |
| Physical Address | Kralja Milana 11, 11000 Belgrade Serbia |
| Website Links | https://www.etf.bg.ac.rs/, |
| Institutional contact name | Prof. dr Kosta Jovanovic |
| Institutional contact email | kostaj@etf.bg.ac.rs |
APPLICATION CASES
| Application case: | Short description: |
| Teaching tool for RL | The key idea is to show the studnents of different levels how to train RL models for solving the task and data generation |
| Research test bed | Using this TestBed researchers are able to test new strategies and develop new models of soft grapsing. |
POTENTIAL STAKEHOLDERS
Non-academic stakeholders
Industrial Partners, Community
Academic stakeholders
Undergraduate students, PhD students, MSc students, Researchers